




Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube。
Mehr erfahren
ProCam®-主动对齐
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube。
Mehr erfahren
ProCam®Align Smart产品视频
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube。
Mehr erfahren
ProCam®为各种应用测试相机模块
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube。
Mehr erfahren
ProCam®-用于汽车应用的相机模块测试
ProCam®
主动对准,组装和测试相机模块和激光雷达系统
凭借ProCam®系列的测量和生产设备,我们为高精度光学传感器系统的主动对准和批量生产的挑战提供了最新的解决方案。主动对准技术对于优化相机模块和激光雷达组件的图像质量具有关键作用。通过在整个视野范围内提供最佳图像质量,主动对准是一种成熟且高效的制造工艺,可用于生产高端相机应用程序和激光雷达系统。

成熟的技术
在亚微米范围内的主动对齐可达六个自由度。它也适用于视场高达180°的广角光学

灵活性
我们实现了这两种方法:将镜头对准传感器板或将传感器板对准镜头,用于双、立体或三重相机以及激光雷达系统

高性能
我们的批量生产系统设计为最短的周期时间小于12秒:每小时可达300个相机模块,产品质量最高
主动对准和装配ADAS摄像机
车辆的先进驾驶辅助系统(ADAS)技术需要高度可靠的图像处理系统和光学传感器,以确保在道路上安全无故障地运行。生命依赖于它。这些要求由TRIOPTICS光学测量和制造系统来满足。我们将这些高精度计量模块集成到批量生产中,为全自动相机生产线的镜头质量检查、主动对准和线尾测试提供解决方案。


产品概述
ProCam®原型设计
为相机和激光雷达校准提供咨询和工程服务
为相机和激光雷达校准提供咨询和工程服务

我们的服务是根据您的要求开发最好的相机模块。该服务包括持续的内部制造原型和小系列。
-
设计优化的最佳图像质量和最佳可能的主动对齐过程
-
根据您的精度要求确定最佳对齐策略和自由度(最多6个)
-
在胶水选择方面提供支持
-
支持根据您的需求(如批量大小和周期时间)选择最佳的制造策略
ProCam®实验室
相机模块主动对齐的入门级系统

用新的ProCam®实验室,我们提供理想的解决方案,为客户谁想掌握主动对准和装配高精度相机模块的关键挑战与少量件。客户可以很容易地开始相机业务,并为以后的系列生产优化他们的原型。
另外购买我们的主动校准系统ProCam®基本的,我们还提供全套的成套设置完整的流水线。全套服务包括:
-
对象发生器,分配模块,UV固化模块
-
用于储存胶水的热固化烤箱和冷冻室
-
样品专用工件载体和镜头夹具
ProCam®对齐智能
用于小批量生产的相机和激光雷达系统装配站

ProCam®Align Smart是一种通过主动对齐优化相机模块光学性能的高级解决方案。
-
自动点胶
-
光学对准传感器或反之亦然
-
精确调整翻译,倾斜,焦点和旋转,以实现最佳的图像质量
-
过程结束自动紫外线固化
-
主动对准在亚微米/亚弧分精度
-
最多6个自由度
-
实时MTF表征和最终MTF测试
-
主动对准广角光学至视场140°(视场可达170°后,个别澄清
-
无限-有限和有限-有限共轭样本的创新目标投影
-
双/立体和三摄像头对齐以及激光雷达对齐的要求
-
易于更换程序使用运动安装
-
机器基本包括控制系统、硬件和软件、操作元件和显示器
-
定制仪器选项:分配器(特定应用),对象生成器(特定相机),工件载体,UV,夹具,相机连接,包括框架抓取器(特定相机)
ProCam®TT
相机和激光雷达系统的组装站,用于大批量生产

ProCam®TT是一种高度自动化的系统,用于批量生产中的相机和激光雷达系统的主动对准和组装。
-
循环时间12秒/每小时300台(视个别客户的相机数据而定)
-
在周期内快速更换产品
-
人工操作的:人工操作的或集成到自动化生产线中的
-
高精度准直目标发生器
-
主动对准在亚微米/亚弧分精度
-
最多6个自由度
-
高精度加胶装置和图像处理控制器
-
广角光学的主动对齐可达180°FOV(可能在个别澄清后)
-
双/立体和三摄像头对准和激光雷达对准要求
-
占地面积小:1400mm × 1480mm × 1875mm
-
可追溯性和分析的综合数据接口
-
连接MES和主机
-
可变外壳手动加载或自动机器人加载
-
可以根据要求集成各种测试模块
-
机器基本包括控制系统、硬件和软件、操作元件和显示器
-
客户和应用特定的设备选项:控制器机架,加载/卸载功能,分配器,物体发生器,工件载体,UV单元,夹具,摄像头连接

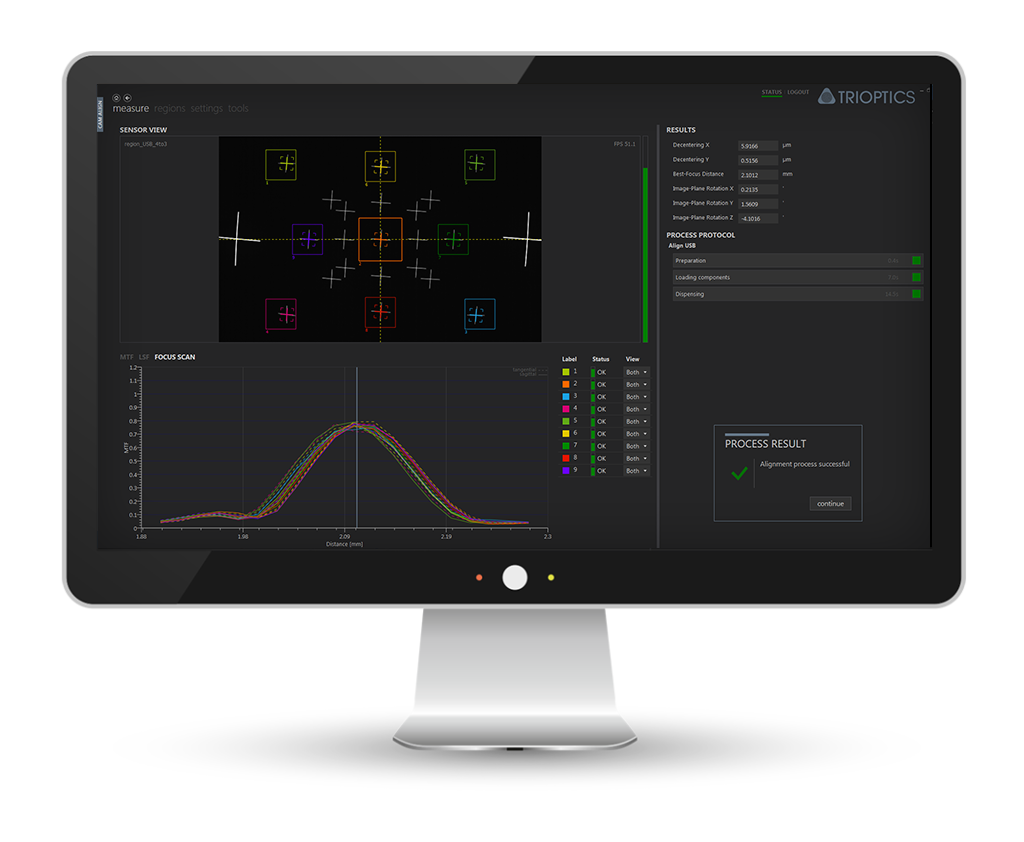
软件
ProCam®软件
ProCam®软件“CamAlign”由全自动主动校准过程的组件组成:
-
利用高精度图像分析算法,实时自动分析与精确对准过程相关的所有参数,如多场位置的MTF和像面倾斜度,并用于对准过程。
-
校准和测量过程的所有阶段都由ProCam软件控制®
-
使用集成的脚本工具,可以轻松地根据特定的客户需求和产品调整测量和校准过程。
-
测量数据可以保存在数据库中,这样整个过程是完全可追溯的
-
不同型号相机模块的配置文件,方便产品快速更换
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube。
Mehr erfahren
技术数据
| 参数 | ProCam®TT | ProCam®Align Smart |
|---|---|---|
| 调整轴 | 5或6个 | 5或6个 |
| 解析线性 | 0.2 μm (X,Y) 0.08 μm (Z) |
0.2 μm (X,Y) 0.08 μm (Z) |
| 分辨率旋转 | 2.5 μrad (Θx, Θy) 5 μrad (Θz) |
2.5 μrad (Θx, Θy) 5 μrad (Θz) |
| 可重复性线性 | ±0.15 μm (X,Y) ±0.06 μm (Z) |
±0.15 μm (X,Y) ±0.06 μm (Z) |
| 可重复性旋转 (俯仰、偏航、滚转) |
±2 μrad (Θx, Θy) ±3 μrad (Θz) |
±2 μrad (Θx, Θy) ±3 μrad (Θz) |
| 典型样品对齐精度,线性 | ±2 μm1) | ±2 μm1) |
| 典型样品对准精度,旋转 (俯仰、偏航、滚转)1) |
俯仰和偏航:±0.6 mrad 滚动:±0.9 mrad(传感器到传感器) ±1.75 mrad(传感器到机械基准) |
俯仰和偏航:±0.6 mrad 滚动:±0.9 mrad(传感器到传感器) ±1.75 mrad(传感器到机械基准) |
| 物镜样品EFL | 0.7 mm ~ 30mm (1mm ~ 12mm标准) | 0.7 mm ~ 30mm (1mm ~ 12mm标准) |
| 样品物镜直径 | 4毫米…30毫米 (直径可按要求增大或减小) |
4毫米…30毫米 (直径可按要求增大或减小) |
| 视场测试图 | 高达70° (个别澄清后最高可达100°) |
高达70° (个别澄清后最高可达100°) |
| 视场准直器 | 高达160°机械设置2) 光学测量可达140°3) |
高达160°机械设置2) 光学测量可达140°3) |
| 测试的目标 | 测试图表或准直器 可与可见光或近红外 |
测试图表或准直器 可与可见光或近红外 |
| 性能 | 300 UPH(单位每小时) 根据以下参数计算: 2秒UV固化时间, 连续图像来自相机@ > 30fps, < 1秒相机启动时间, 按规定装载的部件, 透镜FFL +/-100µm公差 扫描范围<300µm, 校准过程最大。2扫描, 在循环时间内装卸 |
<60秒,处理时间 (不装/卸样) 根据以下参数计算的处理时间: 传感器板初始化时间< 1s, 相机帧>30 fps, 来自相机的连续图像, UV瞬间固化<2s,预选镜片。 |
| 尺寸(高×宽×深) | 1875毫米(1800毫米不含流箱)x 1470毫米x 1550毫米; 定制的 |
2200毫米× 1750毫米× 1100毫米 |
| 相机接口 | MIPI,并行,LVDS,模拟或直接到PC 通过USB,火线,CamLink, GigE等 |
MIPI,并行,LVDS,模拟或直接到PC 通过USB,火线,CamLink, GigE等 |
| 重量 | 600公斤…800公斤 | |
| 类型 | 独立或内联(可集成) | 独立 |
1)典型精度达到以下样品参数:像素尺寸6µm, f# = 2.8, EFL = 4.5mm。
2)根据样品和机械环境,在单独澄清后可达到180°,以满足更大的FoV技术调查的需要。
3)视失真情况,个别澄清必要。
升级和配件

机器人装载

堵塞并生产准直镜穹顶

传感器测试
知识库
为专家提供更多知识
您需要了解的关于相机模块图像质量测试的一切都可以在CamTest知识库中找到…